ビークル制御研究室
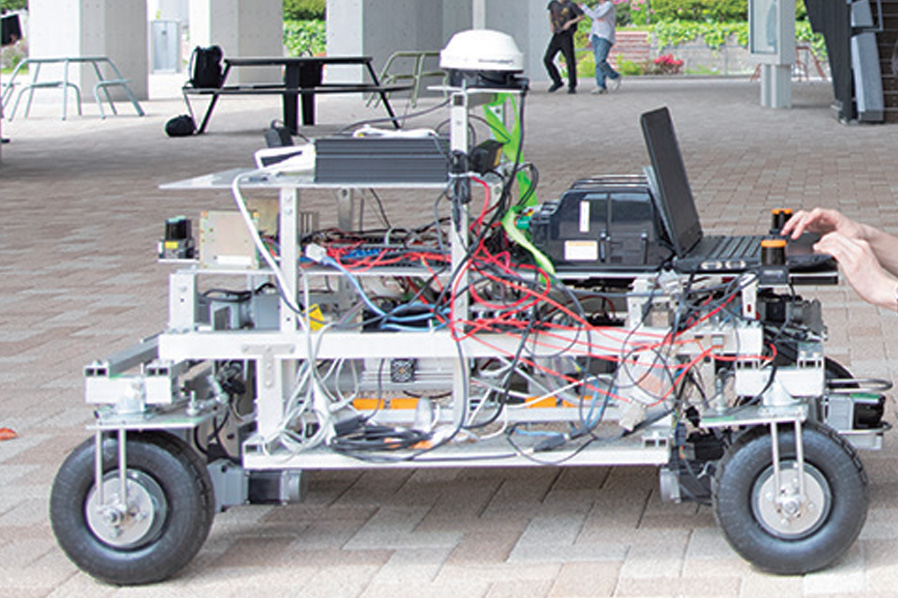
自動車や航空機を対象として、走行制御システムや、運行時の安定性・操縦性を向上させるための研究に取り組んでいます。GPS、ジャイロセンサや障害物センサを用いて、所定のルート・速度で車両を無人走行させる車両誘導制御実験や、ドローンの高度制御試験、フライトシミュレータの操作感向上機能の試験などを行っています。学生たちは自分たちで実験車両やドローンを動かし、試行錯誤を重ねながら摩擦や振動の影響を最小限に抑えて性能の向上を図るにはどうしたら良いかを考え、実力を磨いています。
ビークル制御研究室
自動車や航空機を対象として、走行制御システムや、運行時の安定性・操縦性を向上させるための研究に取り組んでいます。GPS、ジャイロセンサや障害物センサを用いて、所定のルート・速度で車両を無人走行させる車両誘導制御実験や、ドローンの高度制御試験、フライトシミュレータの操作感向上機能の試験などを行っています。学生たちは自分たちで実験車両やドローンを動かし、試行錯誤を重ねながら摩擦や振動の影響を最小限に抑えて性能の向上を図るにはどうしたら良いかを考え、実力を磨いています。